

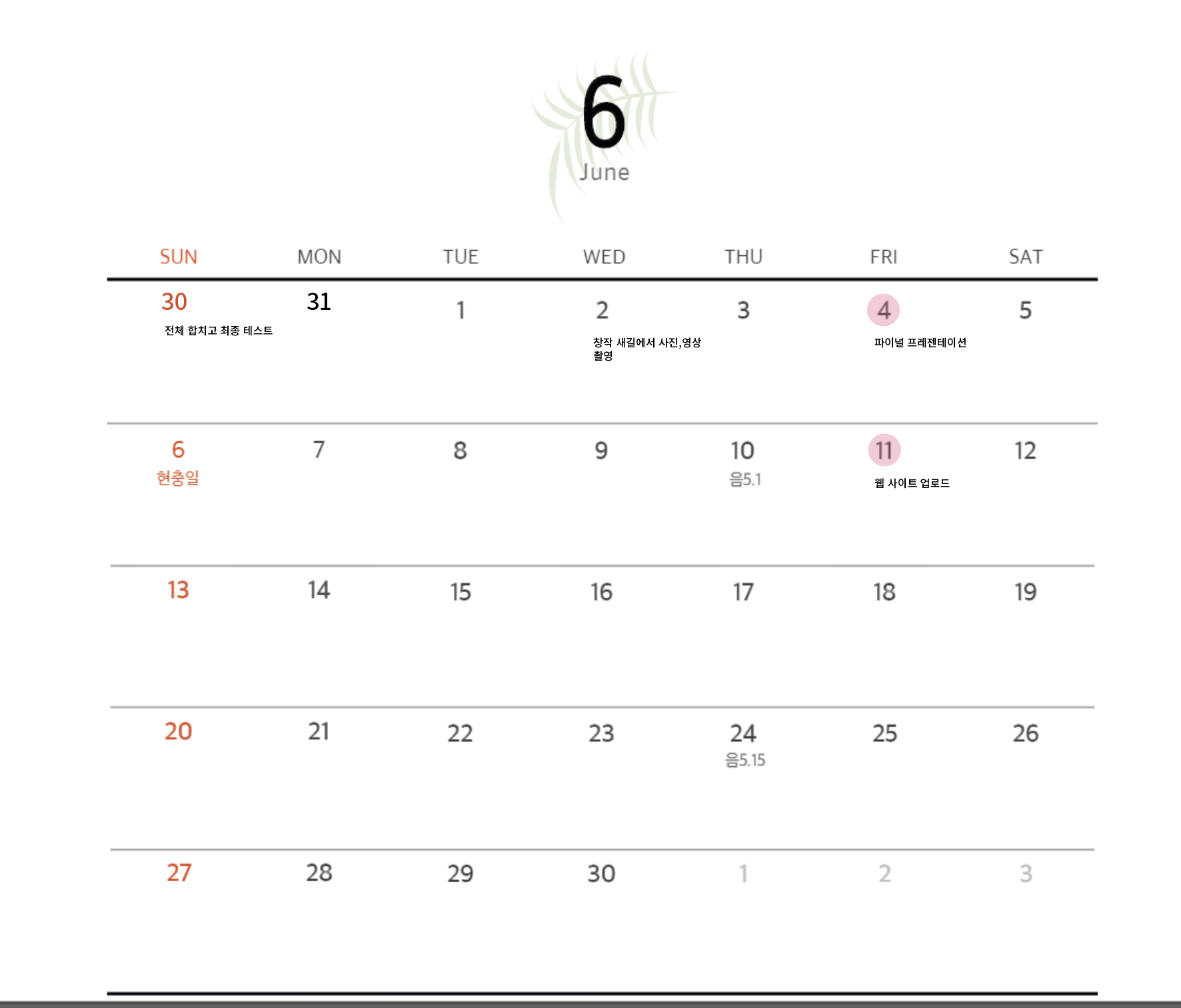
28 수_ 마트방문->샤워기헤드
30 금_ NEW 모터드라이버+모터 연결 / 심박센서+ NEW 모터 연결 / 손잡이 3D 프린팅 모델링
♥️서보모터♥️
서보모터 버튼 제어
서보모터-제어하기
서보모터란? 서보(Servo)의 어원은 라틴어의 Servue로서 노예라는 의미를 가지고 있으며, 목표치에 대한 위치, 방위, 자세 등의 제어가 자동화되어 있는 장치 이름에 붙여지곤 합니다. 이와 같이 서
kocoafab.cc

#include <Servo.h>
int servoPin = 9;
Servo servo;
int angle = 0; // servo position in degrees
void setup()
{
servo.attach(servoPin);
}
void loop()
{
// scan from 0 to 180 degrees
for(angle = 0; angle < 180; angle++)
{
servo.write(angle);
delay(15);
}
// now scan back from 180 to 0 degrees
for(angle = 180; angle > 0; angle--)
{
servo.write(angle);
delay(15);
}
}
서보모터로 기울기 조절해 전원 스위치 누르기 ->서보모터 샤워헤드에 연결
#include <Servo.h> //서보 라이브러리를 불러옵니다.
Servo myservo; // 서보를 제어할 서보 오브젝트를 만듭니다.
int pos = 0; // 서보 위치를 저장할 변수를 선언합니다.
void setup()
{
myservo.attach(9); // 핀 9의 서보를 서보 오브젝트에 연결합니다.
}
void loop()
{
for(pos = 0; pos < 45; pos += 1) // 0도에서 180도로 이동합니다.
{ // 이동할때 각도는 1도씩 이동합니다.
myservo.write(pos); // 'pos'변수의 위치로 서보를 이동시킵니다.
delay(15); // 서보 명령 간에 20ms를 기다립니다.
}
for(pos = 45; pos>=1; pos-=1) // 180도에서 0도로 이동합니다.
{
myservo.write(pos); // 서보를 반대방향으로 이동합니다.
delay(15); // 서보 명령 간에 20ms를 기다립니다.
}
}서보모터 제어하기
kocoafab.cc
우산 구심점 고려
"우산을 양보하는 사람이 우산을 다른사람에게 기울여 양보하는 형태가 되어야함"



우산에 연결구멍 뚫기로
구멍 최소로 만들고 필요시 움직이는 부분만큼 추가로 절단
♥️거리감지♥️
방수 거리감지 센서 테스트

회로참고
코드참고
SIM808_with_Leonardo_mainboard_SKU_DFR0355-DFRobot
SIM808_with_Leonardo_mainboard_SKU_DFR0355-DFRobot
Introduction SIM808 with Leonardo mainboard is the latest Arduino card developed for multi-purpose by DFRobot. The SIM808 module onboard is an integrated quad-band GSM/GPRS and GPS satellite navigation technology module. 4-layer PCB design makes the powerf
wiki.dfrobot.com
#define ECHOPIN 2// Pin to receive echo pulse
#define TRIGPIN 3// Pin to send trigger pulse
void setup(){
Serial.begin(9600);
pinMode(ECHOPIN, INPUT);
pinMode(TRIGPIN, OUTPUT);
digitalWrite(ECHOPIN, HIGH);
}
void loop(){
digitalWrite(TRIGPIN, LOW); // Set the trigger pin to low for 2uS
delayMicroseconds(2);
digitalWrite(TRIGPIN, HIGH); // Send a 10uS high to trigger ranging
delayMicroseconds(10);
digitalWrite(TRIGPIN, LOW); // Send pin low again
int distance = pulseIn(ECHOPIN, HIGH,26000); // Read in times pulse
distance= distance/58;
Serial.print(distance);
Serial.println(" cm");
delay(50);// Wait 50mS before next ranging
}
방수 거리감지 센서 + 기존 서보모터
#include<Servo.h>
Servo servo;
#define ECHOPIN 6// Pin to receive echo pulse
#define TRIGPIN 7// Pin to send trigger pulse
int angle=0;
void setup(){
servo.attach(2);
Serial.begin(9600);
pinMode(ECHOPIN, INPUT);
pinMode(TRIGPIN, OUTPUT);
digitalWrite(ECHOPIN, HIGH);
}
void loop(){
digitalWrite(TRIGPIN, LOW); // Set the trigger pin to low for 2uS
delayMicroseconds(2);
digitalWrite(TRIGPIN, HIGH); // Send a 10uS high to trigger ranging
delayMicroseconds(10);
digitalWrite(TRIGPIN, LOW); // Send pin low again
int distance = pulseIn(ECHOPIN, HIGH,26000); // Read in times pulse
distance= distance/58;
Serial.print(distance);
Serial.println(" cm");
delay(400);// Wait 50mS before next ranging
if(distance<30){
angle=70;
Serial.println("움직임!");
delay(100);
}
else{
angle=0;
delay(100);
}
servo.write(angle);
}
큰 서보모터 연결 실패 => 모터 쉴드 구매
방수 거리감지 센서 + 큰 서보모터 HDKJ D3615 +모터 쉴드
♥️심박센서♥️
심장박동센서 두개 연결
pulse 센서를 각각 타이머 1,2 이용하도록 + 서보모터는 타이머1 내장된 기존 servo 라이브러리 안쓰기로.
steemit.com/kr-newbie/@codingman/servo-h
Servo.h 없이 직접 서보모터를 회전시켜보자(아두이노) — Steemit
Servo.h 없이 직접 서보모터를 회전시켜보자(아두이노) 온라인 가상시뮬레이터 : AUTODESK CIRCUITS 이번에 서보모터의 단순히 전원 공급으로만로 회전을 시켜보는 걸… by codingman
steemit.com
심장박동센서 + 큰 서보모터 DS3235 35KG
pulse 센서도, 서보모터도 타이머 1을 쓰기로 내장되어있어서
타이머끼리의 충돌이 일어남
=> pulse 센서 타이머1로 합치고 서보모터를 타이머2쓰는 라이브러리 적용하려고 시도 - 실패! (
(타이머 2쓰는 서보모터 라이브러리 적용이 안됨)
=> pulse 센서 타이머 2로 합치고, 기존 서보모터 라이브러리로 타이머1 쓰려고 시도 - 실패!
(왜였지? 서보모터가 제대로 안돌았던 것같음)
ServoTimer2 - 도구의인간 메이커스 위키
ServoTimer2 언제필요한가? 아두이노의 기본 servo 라이브러리가 pwm신호를 만들기 위해 내부적으로 AVR칩의 timer1 타이머를 사용하는데, 가끔 timer1 타이머를 필요로 하는 다른 라이브러리와 충돌을 일
lhdangerous.godohosting.com
=> pulse 센서 타이머 2로 합치고, 라이브러리를 쓰지 않는 서보모터 식 적용 - 현재 진행중
(하지만 서보모터 각도가 일정하지 않음) => 전력이 부족한 탓일 수 있다는 조언을 얻음.





Arduino) 라이브러리 없이 서보모터 제어하기
아두이노를 공부하기 시작하면 초중반부에 빠짐없이 나오는 것이 서보 제어이다. 아두이노 내장 헤더파일 Servo.h와 PWM핀을 통해 서보를 제어하게된다. 아래 코드를 보자. #include Servo myservo; // crea
hwlim2000.tistory.com
♥️디바이스♥️
기둥 너비 30cm
위에 올라갈 수조 높이 45cm => 우드락 26x45 (너비x높이), L자 나무지지대 2x45 *4개









쇠 경첩 *4, 나사로 기둥과 수조 연결




1차 페인트 작업 완료
=> 틈새 메우는 작업, 2차 페인트
=> 나무 기둥 2개 작업
=> 전력 추가 공급해 서보모터 정상 작동하는지 확인
(추가 구매: 페인트, 경첩?, 나무전용 접착제?, 글루건심)
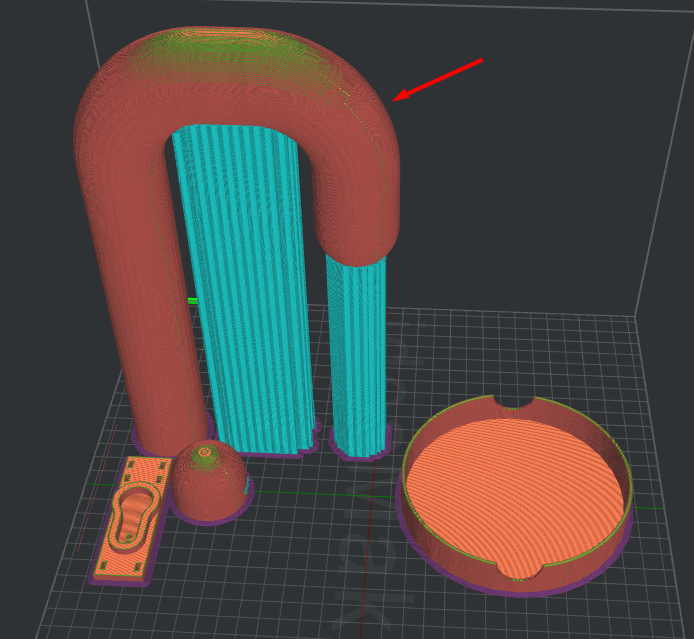
3d printing test




♥️♥️♥️♥️♥️♥️♥️♥️♥️♥️♥️♥️♥️♥️ 재료 ♥️♥️♥️♥️♥️♥️♥️♥️♥️♥️♥️♥️♥️♥️♥️♥️♥️
📍 폴리카보네이트 X -> 나무 합판




📍 서보모터 HDKJ D3615


📍 아두이노 모터 드라이버 H브리지 L298P 쉴드

📍 DS3235 35KG Coreless Stainless Steel Gear Waterproof Digital Servo

📍 샤오미 차량 어댑터
=> 실패! 변압을 적어도 7A 이상이어야함 이건 1..
샤오미 차량용 공기청정기 가정용 어댑터
COUPANG
www.coupang.com
📍 폼보드 10t *2 + 페인트 + 롤러 + 쇠경첩

♥️♥️♥️♥️♥️♥️♥️♥️♥️♥️♥️♥️♥️♥️ 무드 ♥️♥️♥️♥️♥️♥️♥️♥️♥️♥️♥️♥️♥️♥️♥️♥️♥️

'T.I.L' 카테고리의 다른 글
| tragedy (0) | 2021.05.03 |
|---|---|
| 아두이노 워크숍 2 (0) | 2021.03.27 |
| 20201030 융복합 (0) | 2020.10.30 |
| 20201004_jsp 와 웹 상태유지 기법 (0) | 2020.10.04 |
| 20200929 융복합 아이디에이션 (0) | 2020.09.29 |

